Research
Soft Robots: Why Some of the Best Machines Are Squishy
Soft robots made of silicone and rubber can grab an egg, squeeze through tight spaces, and even work inside the body. A look at robotics' squishy frontier.
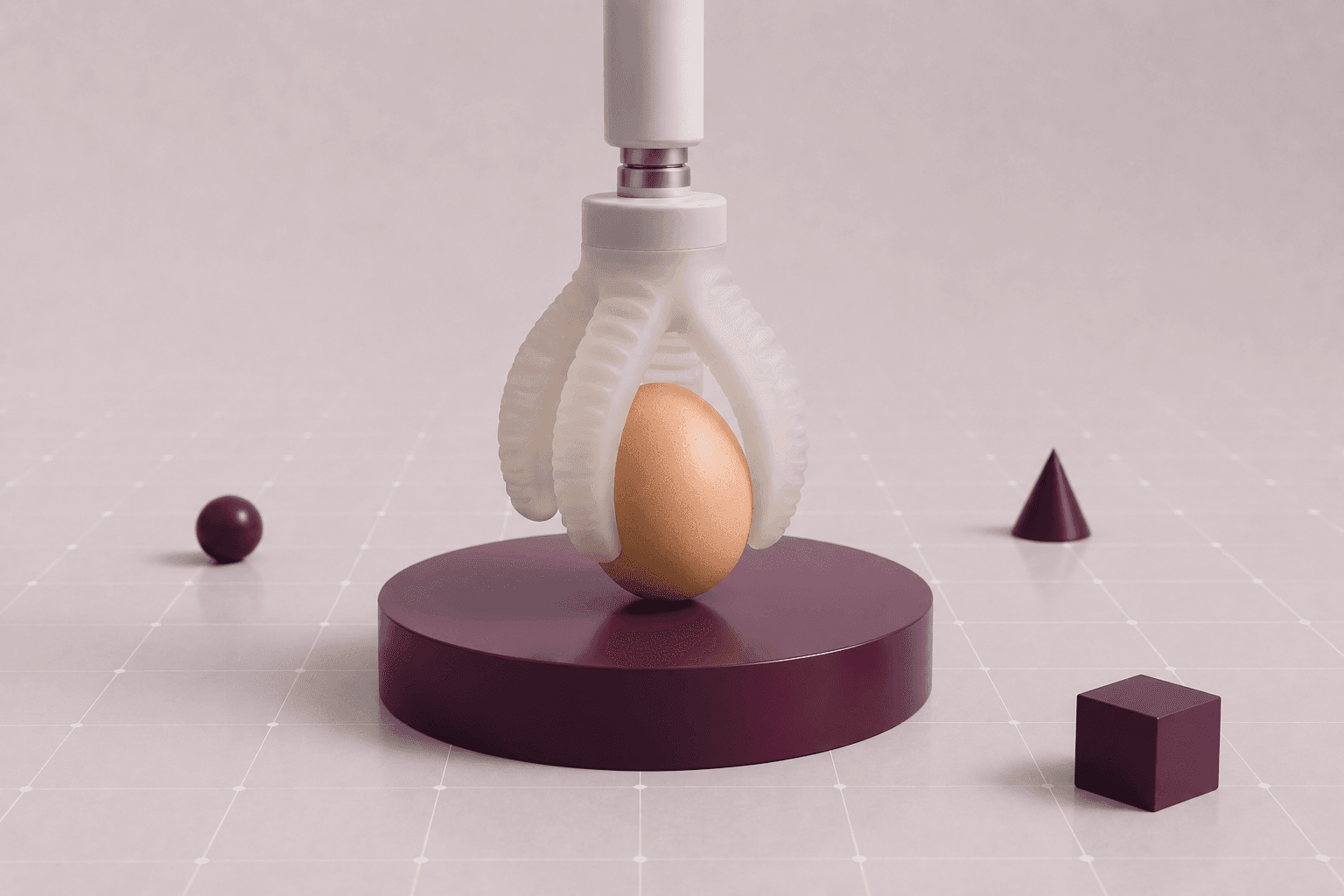
A silicone gripper picking up a raw egg, cleanly and effortlessly. What if the best robot for the job is the squishy one?
It sounds like a joke, but soft robots are a real and fast-growing field, and they're solving problems that rigid machines have struggled with for decades. The whole premise is to swap metal and motors for silicone, rubber, and other flexible materials, so the robot can bend, deform, and adapt to the world instead of fighting it.
What are soft robots?
A soft robot is a machine built partly or entirely from soft, flexible materials. Rather than rigid links driven by precise motors, it uses compliant structures that change shape, often powered by air pressure, fluids, or flexible actuators.
That one change has a big consequence. Because the body can deform, the robot adapts to whatever it's interacting with. No precise positioning, no complex gripping algorithm. It just conforms. They're still robots running the same sense, think, act loop as any rigid machine; they simply solve the "act" part with a body that gives.
Why a soft gripper beats a rigid one?
Picture the difference in grasping. A rigid gripper needs to know exactly where an object is, how big it is, and how much force to apply, or it crushes or drops it. A soft gripper wraps around the object and lets the material do the work.
That's why soft grippers handle things rigid robots find hard: fruit, fragile materials, oddly shaped parts. Instead of relying on perfect positioning and tight control, they adapt to whatever lands in their grip. For messy, unpredictable real-world objects, that adaptability is a genuine advantage.
Where soft robots shine
The same flexibility opens up environments rigid machines can't easily handle.
Soft robots can squeeze through complex, confined spaces, move over uneven terrain, and interact gently with delicate things. One of the most striking applications is medicine: soft devices can operate inside the human body, where a rigid mechanism would be dangerous. Harvard's Soft Robotics Toolkit documents many of these designs, from wearable assistive devices to surgical tools.
Anywhere the world is irregular, fragile, or hard to reach, a body that conforms has the edge.
The catch: soft robots are hard to control
The same property that makes soft robots adaptable makes them difficult to engineer.
Control is the big one. When a robot is flexible by nature, predicting exactly where it ends up takes serious modeling, because the body has effectively infinite ways to bend. Speed and force are limited compared with rigid actuators. And sensing is still an open research problem: figuring out what a soft robot is actually doing, in real time, is much harder when there are no fixed joints to measure.
That difficulty is also the appeal. The field is young enough that the fundamentals, from materials to control theory, are still being worked out.
Why soft robotics is just getting started?
Biology settled this question a long time ago. Octopuses, elephant trunks, and human hands all show that in most real-world situations, soft and adaptable beats rigid and precise. Robotics is only now catching up.
As materials, actuators, and control methods mature, expect soft robots to show up in more places where gentleness and adaptability matter more than raw speed or strength. It's one of the most open frontiers in robotics, and a great area to watch if you're deciding where the field is heading.
FAQ
- What are soft robots? Soft robots are machines built partly or entirely from flexible materials like silicone and rubber, rather than rigid metal links and motors. Their bodies bend and deform, which lets them conform to objects and environments instead of relying on precise positioning.
- What are soft robots made of? They're typically made from elastomers such as silicone and rubber, along with flexible fabrics and compliant actuators. Many are powered by air pressure or fluids that inflate chambers to make the structure bend or grip.
- What are soft robots used for? Common uses include gripping delicate or irregular objects such as fruit, moving through tight or complex spaces, and medical applications where a device needs to operate safely inside or against the human body.
- Why are soft robots hard to control? A flexible body can deform in countless ways, so predicting its exact position requires complex modeling. Their speed and force are also limited, and sensing what a soft robot is doing in real time remains an active research challenge.
- How are soft robots different from traditional robots? Traditional robots use rigid links and motors and depend on precise positioning and control. Soft robots use flexible materials that conform to objects and surroundings, trading precision and speed for adaptability and gentleness.
- Can you simulate soft robots? Yes, but soft-body simulation is harder than rigid-body simulation, because flexible materials deform in complex ways that usually require specialized methods like finite element modeling. General ROS 2 simulators and agents like Drift, which generate rigid-body robot simulations from a single prompt, are built for conventional robots, while soft robotics simulation remains a more specialized, research-heavy area.
Related reading
- What Even Is a Robot? (It's Messier Than You Think)
- Robot Simulators, Compared: Which One Should You Actually Use?
- Building a Mobile Robot Simulation in ROS 2 From a Single Prompt
- Adding a LiDAR Sensor So Your Robot Can Finally See
- I Used an AI Agent to Explain the LeRobot Codebase (Hugging Face Robotics)