Research
The 5 Most Common Ways Robots Navigate
Robots don't naturally know where they are. Here are the five most common ways robots navigate, from wheel odometry and GPS to visual odometry, SLAM, and Nav2.
Getting a robot from point A to point B sounds simple. The hard part is that a robot has no built-in sense of where it is.
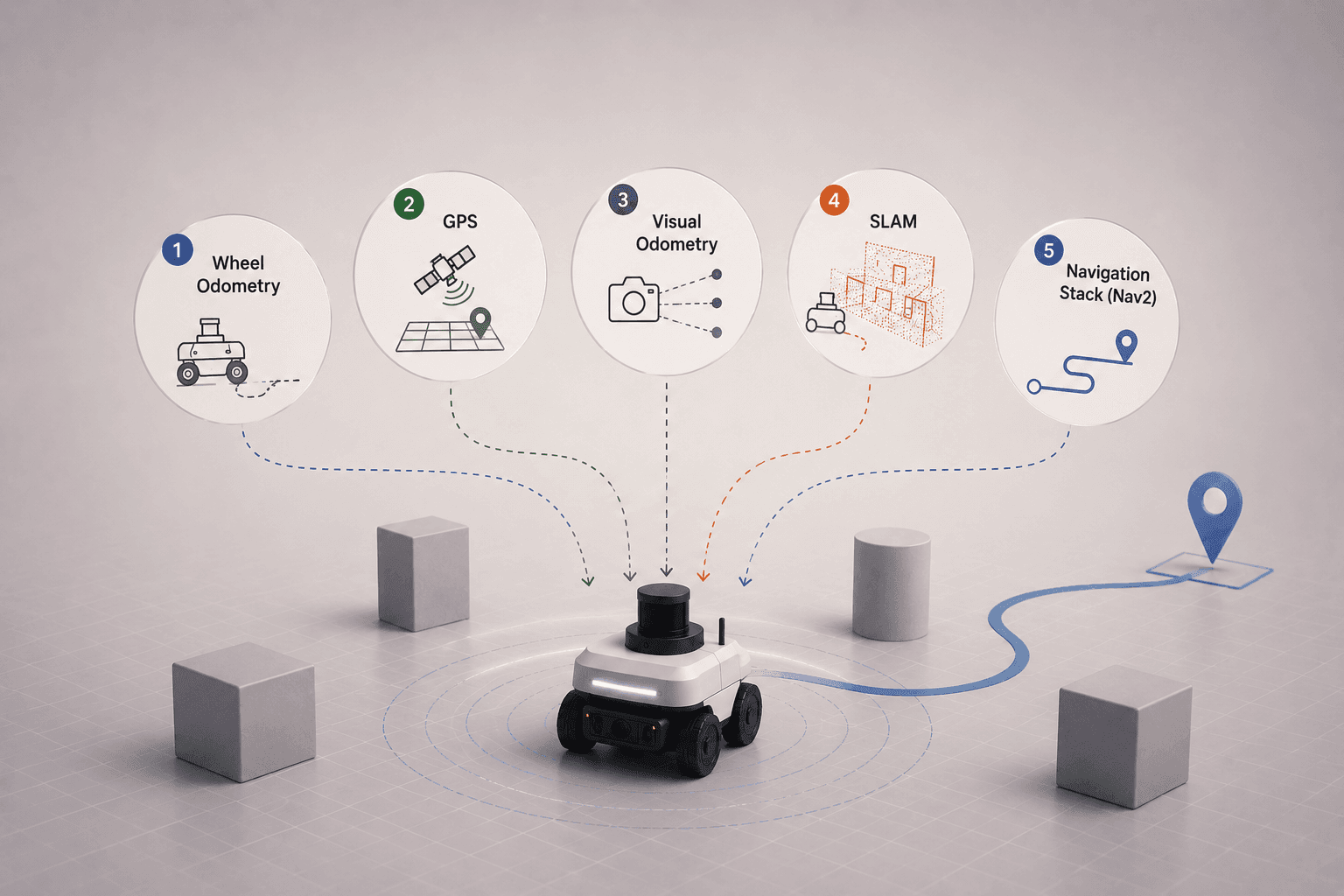
Understanding how robots navigate comes down to two questions: where am I, and how do I get to my goal? Here are the five most common methods robots use to answer them.
Why navigation is hard for robots
A person walks into a room and instantly knows roughly where they are. A robot starts with none of that. It only has sensor readings, and it has to turn those raw numbers into an estimate of its own position, a model of its surroundings, and a plan to move. Below are the five most common ways robots navigate. Each tackles part of that problem, and each comes with its own trade-off.
1. Wheel odometry: estimating distance from wheel rotation
The simplest method is wheel odometry. By measuring how far its wheels have turned, a robot estimates how far it has traveled and how its position has changed.
It's simple, inexpensive, and works well over short distances. The catch is drift: if the wheels slip even slightly, the small errors accumulate over time, and the robot's estimate of where it is slowly diverges from reality.
2. GPS: knowing your position outdoors
What if the robot could know its actual position instead of estimating it? Outdoors, that's what GPS provides. It gives an absolute fix on location, which makes it a natural fit for drones, delivery robots, and autonomous vehicles.
The limits are well known. GPS struggles or fails indoors and near tall buildings, and even outdoors it often isn't accurate enough on its own for precise movement, so it's usually fused with other sensors.
3. Visual odometry: tracking movement with cameras
Cameras offer another approach. Instead of counting wheel rotations, visual odometry tracks features in the environment from frame to frame and uses how they shift to estimate the robot's own movement.
It's especially useful for drones and for robots operating where GPS isn't available. On its own, though, it estimates motion rather than giving the robot a full understanding of its surroundings, which is where mapping comes in.
4. SLAM: mapping and localising at the same time
What if the robot could build a map as it explores? That's exactly what SLAM does, short for Simultaneous Localization and Mapping. The robot creates a map of its environment while continuously working out where it is within that map.
Doing both at once is what makes SLAM powerful, and it's one of the most widely used techniques in mobile robotics. It usually runs on sensor data from a LiDAR or camera, which is why adding a sensor like a LiDAR is the step that unlocks mapping and navigation in the first place.
5. Navigation stacks: planning the actual path with Nav2
Once a robot knows where it is, one question remains: how does it actually get to its destination? That's the job of a navigation framework like Nav2, the navigation stack for ROS 2.
These frameworks plan a path to the goal, avoid obstacles along the way, and continuously update the route as the environment changes. In other words, they turn localization into real navigation, the difference between knowing where you are and actually moving there.
How robots combine these methods
Modern robots rarely rely on just one of these. A mobile robot might fuse wheel odometry with a LiDAR running SLAM, correct its position with GPS outdoors, and hand the result to a navigation stack for path planning. Each method covers another's blind spots.
That's the real takeaway. In robotics, knowing where you are is only half the challenge. Knowing how to get where you're going is the other half, and reliable navigation comes from combining sensing, mapping, localization, and planning into one system.
FAQ
- How do robots navigate? Robots navigate by estimating their position and then planning a path to a goal. They use methods like wheel odometry, GPS, visual odometry, and SLAM to figure out where they are, and a navigation stack to plan and follow a route. Most robots combine several of these.
- What is wheel odometry? Wheel odometry estimates how far a robot has moved by measuring how much its wheels have rotated. It's cheap and works over short distances, but wheel slip causes small errors that accumulate over time.
- What is SLAM in robotics? SLAM stands for Simultaneous Localization and Mapping. It lets a robot build a map of an unknown environment while continuously tracking its own position within that map, and it's one of the most widely used techniques in mobile robotics.
- What is the difference between odometry and SLAM? Odometry only estimates how the robot has moved, so its errors build up over time. SLAM also builds a map and uses it to correct the robot's position, which keeps localization accurate over longer distances.
- What is a navigation stack like Nav2? A navigation stack is the software that turns localization into movement. Nav2, the navigation framework for ROS 2, plans a path to a destination, avoids obstacles, and updates the route as the environment changes.
- Can Drift set up navigation for my robot? Drift builds the simulation foundation that navigation depends on, including the robot description, sensors like LiDAR, and the simulated world. Navigation stacks such as Nav2 then run on top of that setup to handle mapping, localization, and path planning.